Helicopter Project
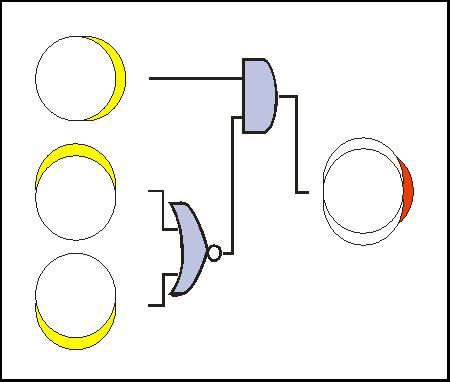
亇倶丄亇倷偺巐曽岦偵偁傜偐偠傔僔僼僩偟偨夋憸傪梡堄偡傞
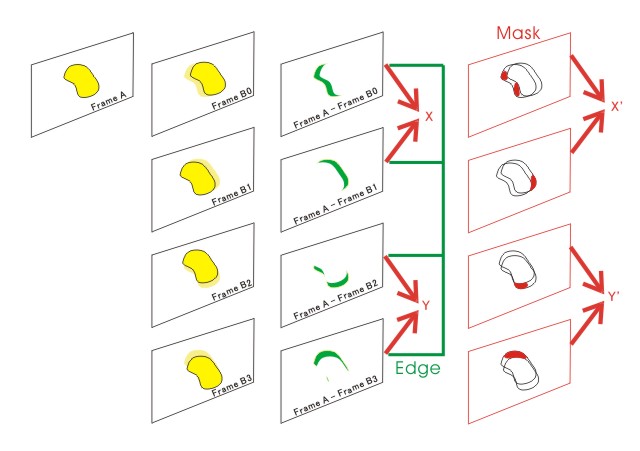
嶰偮偺僔僼僩夋憸偐傜儅僗僋傪惗惉偡傞
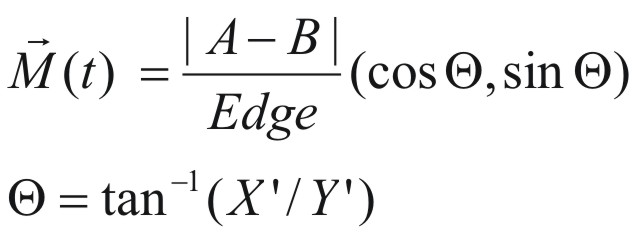
摦偒偺愨懳抣偼嵎暘夋憸偐傜拪弌偟偝傜偵僄僢僕偺悢偱婯奿壔偡傞
嵟廔揑側摦偒儀僋僩儖偼儅僗僋偲嵎暘夋憸偐傜偺椉曽偺寢壥傪巊偭偰摫弌
儅僗僋偝傟偨夋憸偐傜摦偒偺曽岦傪拪弌偡傞