すべて
の場所をランダムウォークで埋め尽くす問題
移動角度の誤差の問題
現在位置に近い場所ほど信頼度が高いマッチングシステムをつくる
パターン(信頼度)に従ったマップを構築し、それにしたがって出力をつくる
その出力結果があっていれば、信頼度をさらに上げるシステムにする。
探索されていない場所を探すシステムにする
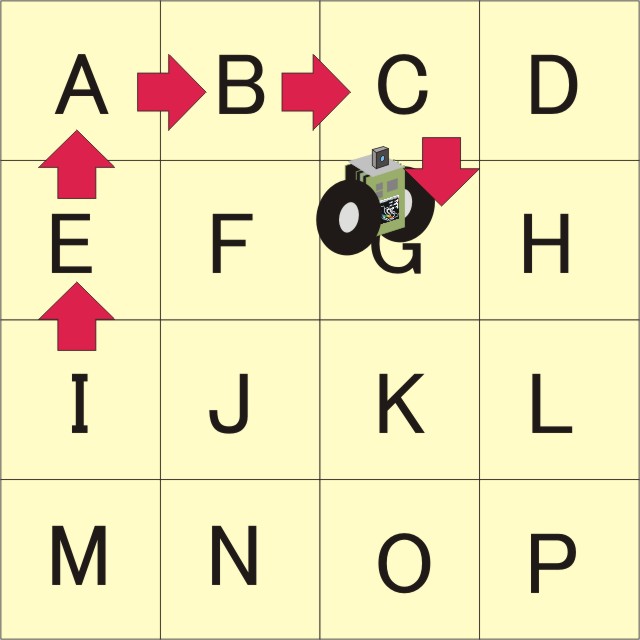
Robo Project